
我们可以想想飞机的诞生。人们为了飞机★■■★,做出多少可歌可泣但失败的故事■◆■。例如★◆,模仿扑翼。我是学航空的。在莱特兄弟发明飞机前差不多50年◆◆■★,有人第一次提出了飞机理论:飞机不需要扑翼,而是要具备独立的升力系统■★■、推进系统、控制系统。翅膀就同时具备了这三个系统。人类擅长的机器是回转运动的(轴承、内燃机都是回转),不是肌肉运动。肌肉运动有好处,它可以把一个大的力分散成无数小的力,所以可以控制每个羽毛★■■■。
人类社会进步分为资源型和知识经济型◆★★★◆◆。人类大部分时间是资源型,非常残酷、你死我活■■。很幸运人类遇到工业革命,变成知识推动进步。但恰恰从08年经济危机,科技进步太小,而人的欲望总要上升,就又为资源打得头破血流了■■。
如果同样这个活儿让我去干,我很可能就描述成“性价比更高的可回收火箭”——是不是一下就low多了(笑),听起来像是火箭界的拼XX◆■★,感觉还需要发到朋友圈让别人砍一刀。如果发射失败了◆◆■◆★■,人们觉得这点小事你都干不好。而马斯克用极其宏大、遥远的愿景给他当前做的事增添吸引力,并且增加对短期挫折的容忍度★★◆。

邵天兰■◆★◆■:我们主要做3D视觉引导工业机器人,让机器人识别定位、规划、处理任务。现在干的包括抓取、装配◆★■★◆、切割、涂胶等。你看我们的产品是相机+软件,除了制造业场景,有客户拿我们的东西在矿井里挖煤■◆◆★,给汽车加油或充电,摘苹果。未来,希望成为机器人传感感知规划上的一个基础设施◆★★。
腾讯科技:所以你觉得马斯克的真实想法,既不是人形机器人■■,也不是进入家庭。
邵天兰■■■■:因为人本身很多任务也干不了★■。像清洗通风管道,需要蛇形机器人在管道里爬。人在完成很多任务的时候也需要借助工具。

腾讯科技★◆◆★◆:特斯拉做机器人,能从自动驾驶延续的优势是什么?不能延续的是什么■★★◆■★?
今天我们做机器人也是这个思路◆■◆,做家用级■★◆★■■,那要寻找消费电子的酷、炫、炫耀……大疆无人机平均买回去,生命中打开两次;买手机某些功能(比如100倍变焦)花了巨大溢价◆★,可能只是开箱试用使用了一下而已。这是消费电子的特点■★■★。很多功能买过来,是我要有,但未必真的用。
邵天兰:这不是一个维度的难度。甚至可以说,移民火星从今天的技术原理上也许是可以实现的,只是经济问题。
马斯克能加速推进人形机器人或通用机器人的落地吗?机器人会以何种形态大规模走进人类社会■■◆?它会多大程度重塑人类社会结构★◆◆?甚至,它会和人融合吗★◆?在这些CEO和投资人脑海里,有着异常不同的世界观★★★。
王世全■◆:我希望机器人是比较有爱的存在。让人看到内心愉悦,不是冷冰冰,也不必追求纯粹像人一样的外观。我希望技术是围绕着人,让人们从劳累、重复性的工作中解放出来,更加去享受生活。如果机器人强于人,去替代一些仍未有劳力短缺的行业★◆◆◆◆,加速人们失业,我并不向往。它是做与不做的取舍问题,是原则底线
曹巍◆★■■:现在开始出现特斯拉的人形机器人,这个人形机器人还没有眼睛,是个大平板,已经进入到像人又不像人的阶段了。
北京时间10月1日,马斯克发布了特斯拉人形机器人的原型机。这款叫擎天柱Optimus的机器人★★■,马斯克预热整整一年,吊足了公众胃口。但是★■,看完发布会,机器人从业者看法相对一致★★◆◆★■:没有惊艳,基本在预期内。
此时此刻马斯克在用他的火箭做什么?用低成本的可回收火箭发近地卫星——这离运几十万人去火星还相差十万八千里■■■★。但他用“殖民火星”这样宏大、激动人心的远期引领性目标来宣传,可以吸引更多人才和资本参与进来,并且让大家对短期可能的失败更有容忍度◆■★★■。
腾讯科技:说回来◆◆★■,你认为为什么绝大部分人对马斯克做机器人■◆◆◆,关注点都是人形?
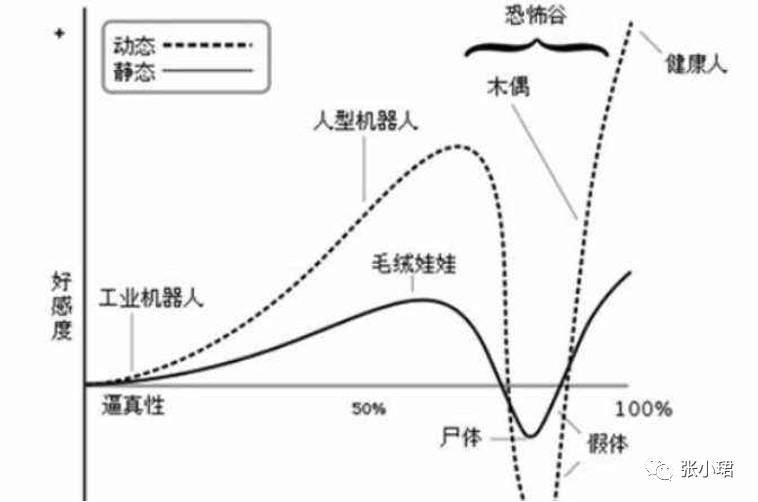
所以,恐怖谷是人形机器人的创新陷阱。你如果做到这个地方,搁在家里很吓人——啪!那边出来一个两眼冒着光的!晚上,这个黑影子在你家里溜达!

在谷底◆◆◆■◆,这个大型机器人,像人又不极致★■◆,比如像僵尸■■★,没办法做到惟妙惟肖。这个时间段人看到就发怵——它像我,又不是我◆◆★★,动作很怪,很瘆人——这个地方叫“恐怖谷”。再往后发展,机器人长得跟人一模一样,最后分不出是人还是机器了,人对机器人的好感又会提升。
我也不担心造成人类失业。每次重大科技进步,都会带来全球分工结构性变化。我们曾经从奴隶社会到农业社会,一部分人转成农民★◆◆■◆■、瓦匠,转出专业分工◆■■■◆★,出现大规模协作。如果工厂的人被机器替代了■★◆,短期造成失业★■■★■,那是因为做结构性调整★■◆■★■。
3、中国创业者群体有活跃的community◆★,不仅设置机器人工程专业的高校多,创业的人多,资本也多◆★◆,还有上下游生态,这让产品迭代相较其他国家快★◆◆■■★;
未来二十年或五十年,你一推开门,发现外面的人都在快速移动★◆■★■、飞檐走壁◆◆★■★◆,如果你没有一台外骨骼护体,你都不敢出门。
邵天兰◆■◆:我认为有机会。但这个问题就跟自动驾驶、核聚变、量子计算一样★◆◆■★,工作量很大■■◆◆◆■,很难精确预测。
这次发布会的亮点,不会是他在智能上做多少■◆,因为就是自动驾驶这部分◆★★■◆■。关键是执行器有没有创新。(执行器指◆★,机器人要将指令转化为真实世界的运动★◆■■■,执行指令■★◆,相当于大脑以外的部分。)如果执行器有很大创新,那它的适应性就很广★◆★。如果执行器没有重大创新,它就需要做很多适配跟生产任务产生连接,就有很多剪刀手爱德华。很可惜,这次发布会没有看到突破。
人的肌肉重量不大,但它的力量很大。比如人1公斤肌肉★◆★★★◆,可能产生100公斤的力。但电机,完全没有做到这点。为什么机器人力控那么复杂?是因为现在的电机把自身重量驮起来,就颤颤悠悠了,根本没有富余的控制力去做别的。这是本质。其他问题没有到不可突破的边界问题◆■■■。
第二是技术,通用型机器人是否有可能产生?我报以一定的乐观。以前机器人很多是专用的,当成专用设备去做,控制系统是专用的◆◆■■,操作环境是专用的,每个领域都独立。但现在有些技术发展使通用成为可能,概括起来是驱动技术和控制技术。
人形机器人在家做任务★★,难度甚至高于自动驾驶。人型机器人和自动驾驶都需要传感、感知、规划◆■★◆★、决策和执行,咱们就从这几个维度比一比★■◆。从传感看,自动驾驶的传感难度在于距离远◆■★★、实时性高★■★★■,但是粗糙。机器人不行,比如削土豆,就得能看见土豆上的坑。
但是,怎么样让机器人在厨房工作是人类现在不知道的■◆★★■,甚至还没有完整的思路■◆。靠堆经费也解决不了★■◆★■◆。
不过,技术创业者不否定大胆的想法。很多事情回到100年前,跟当时的人讲★★◆,他们一定不信■★★。能做成和人类一模一样的机器人也非常伟大,或许某天攻克了人类的大脑和脑机接口技术■◆,做到意识上传,那么这个机器人就是我们意识的载体★■,获得永生★◆◆★◆。无论如何,我们终将通过机器人技术来推动人类进化公海官方网710jcjc。
俞浩:我觉得优先会在工厂。不断在落地中,把重复低效的工作替代掉■◆■◆◆◆。以餐厅举例,它分前台、后台■◆◆,前台要跟人交互■■★、微笑,后台是切菜、送菜。人最重要的是交互★★■★◆★,这是最难以被替代的。越是一个工作岗位,那个人毫不在乎形象,年纪偏大,是最能被替代的◆◆■★◆■。工厂也这样◆◆,就如福特说:“我明明只想雇一双手,为什么来了一个人■◆◆★■? ◆◆■”机器人就是给你一双手,不给你这个人和他的情绪。
第三从产业角度★◆,机器人公司,大家之前喊了几十年★■,但是都做不大。恰恰因为前两点★◆◆■■★,特别是第二点专用化。一个20人的公司五脏俱全,什么都来一套,非常没效率。假如通用机器人诞生■◆★,产业会重新分工,有人专门做硬件/软件/开发/应用◆◆■★★,大大提升产业效率★■◆★。
曹巍:能搬箱子、拎包◆■◆◆,已经很厉害了■◆■■。如果能切西瓜■◆◆◆、绣花,我觉得是超乎这个时代的技术能力了。
《未来简史》里提到,未来硅基生命会取代碳基生命,这不是灭绝性的转变,而是一种进化★■★■。人和机器人会在这个过程中充分的融合。就像我们现在已经时刻离不开手机,它是我们的千里眼★■★◆■◆、顺风耳■■★■■。
因为开车基本用不到。我举个例子★■■★■,让机器人去剥鸡蛋■★★、剥小龙虾——这是人对外部环境和一些细微动作的感知能力■◆◆★,而且人去感知环境是多维的。除了视觉外还有声音■★、触觉、嗅觉和其他■★★,这些机器人不具备。
我为什么这么去理解★◆★◆?因为我人生的追求跟这相通。我自己也这么想,所以我这样理解他■◆■。
曹巍:它两条腿走,走得比较快,在复杂环境不丢失,这个能力应该能做到。你如果让机器人做到实时建模、自主移动导航,跟特斯拉的自动驾驶能力接近★★◆。特斯拉自己也讲,底层芯片是一样的★■,是基于超级计算机Dojo系统★◆、D1芯片、纯视觉的算法◆■◆■■。这些基本可以沿袭。
邵天兰★◆■★■◆:《环太平洋》★★■◆,你看过吗?这个电影里没有任何的投机取巧■◆,没什么花活、计谋◆■◆,就是真刀真枪一拳一拳正面跟怪兽硬刚★◆◆。
曹巍:市场上有些文章比较极端,说特斯拉出来人形机器人,其他公司会被淘汰。很多人不太懂■◆★■,自己YY——每个机器人或智能体,是要帮助人类解决所在场景的痛点和难点。最后它的形态是人基于这个场景痛点和难点迭代了10、20甚至50年。只有当这个场景的痛点和难点必须通过人形机器人才能满足★◆■★★,人形才是最优解。
机器人就是我们可以欺负欺负的另一个物种。我们公司做外骨骼机器人,是人机融合产品。外骨骼机器人现在只是初级状态。未来我们对标的是什么呢?说出来怕你觉得荒诞,是超级英雄里的“毒液■★★”。
再一点,特斯拉从20年前新锐的新能源汽车厂◆■,成为主流汽车厂■◆,想象空间和估值受到挑战◆★★◆◆。他现在扔出来一个新概念,开启第二曲线年。
我对未来机器人的看法更接近《机器人总动员》中那样,有各种各样的机器人完成各种各样的任务。比如瓦力是收集垃圾轧成方块的机器人★■。还会有各种各样的机器人,比如擦玻璃的★★■◆、盖房子的、做饭的、在医院有医疗机器人、在酒店有酒店机器人——天上飞的,地下跑的◆■,奇形怪状★◆★■,八仙过海。

可能以后人不跟人好了,都跟机器人好了,这个会有负外部性。(笑)近似于人这种形态的机器人,为什么很多科幻小说或电影里是被的?因为人是不完美的◆■★,机器人是完美的。
第一从宏观来说★★★★◆◆,我们本质在寻找让人类生产力提高10倍的工具。为什么有人看好,有人不看好。我们对1-2年能迅速落地的要求太高;对10年持续进步,期待过低★◆★★■。但是◆◆,只有生产力10倍进步,才能带来更富足的社会。
发布会前■◆■,我和多位机器人CEO和投资人聊了聊◆■。在中国,机器人行业处于爆发早期,资本很热,但尚且没有出现赢者通吃或一骑绝尘的巨头★■★◆■;各公司在相对垂直的领域精耕细作。他们有让机器人成为下一个汽车■■■◆★、手机和人类历史上伟大通用产品的雄伟愿望,但苦于人类共同的技术困境,很多时候仍然挣扎在基础科学之上■★◆★■◆。
挑战部分,我为什么说执行器,为什么说肌肉,因为它假定是要替代绝大多数人。但现实世界之所以是这样★★,是因为人是肌肉驱动★★★◆◆,机芯是电机驱动。电机驱动的世界◆★,跟肌肉驱动世界不可能完全一样。你刚问我世界会发生什么变化★■■★?最大变化是★◆★★,所有行业要从适应肌肉驱动变成适应电机驱动★■◆◆。
这很像当前机器人行业的现状——没有一击毙命的奇技淫巧■★★◆◆,没有一蹴而就的■■★■◆“银弹◆◆★■”,就是无数要解决的工程问题。你能做的就是想办法一拳一拳地把问题一个个解决掉。go big or die。
我们有几个长期观点★■★◆■。全球市场看,机器人确定性非常高■◆★。各个国家,特别是发达国家遇到了劳动力短缺,人类文明发展到一定阶段繁衍后代是最大挑战■■★◆,各国生育率◆★★★◆◆、劳动力供给都有问题。而中国在这一波机器人的大浪潮里公海官方网710jcjc★◆◆,有得天独厚的系统性机会:
四轴飞行器虽然留空时间短,但可以结合大疆的平衡云台做航拍。它把以前小众的专业场景应用,用小的无人机实现了,还足够便宜■◆■★■。那时候海外大概六七百美金,按他们的收入相当于中国人六八百人民币买个高端玩具。以前专业玩家玩的航拍■★,老百姓也能玩了◆■★◆★。加上视频网站兴起,上帝视角拍摄的视频十足炫。所以,PMF让无人机一下商业化落地了,火起来了★◆◆★。
为什么特斯拉市值那么高?我12◆◆■★★★、13年从学校出来,本来要做电动汽车★■,我去过全世界非常多好的汽车工厂。看完特斯拉的,我震惊了!去之前同事跟我说,去看看美国先进生产。去特斯拉的美国工厂,那叫脏乱差——是的,你没听错——工作节拍比中国至少慢一半★■,里面的工人跟你say hi,你能想象去中国工厂有工人能跟你打招呼?手上活都忙不停。而且产线大量积压。
这种偏跑酷类机器人做后空翻★◆■★■,身体机能、爆发力要足够好,就涉及一个偏学术的词■■◆◆:能量密度■◆■★★。因为电机本身有一定体积,会通大量电流,发力时有能耗,会发热◆★◆◆■;但是热到一定程度电机会烧坏◆★★★◆■。所以一般单位体积或重量的电机扭矩有上限■★★。

王世全◆■◆■◆:人形机器人是挺难的事。20多年前Honda(日本本田)推出ASIMO◆◆★,机器人的柔顺度◆★、跑步、踢球、端杯子◆■◆★、和人互动就走在前沿了■◆◆★。他们刚出来■■■,全球很多做人形机器人的实验室都把项目停掉了■★◆★■。因为望其项背。在斯坦福大学◆★,我跟ASIMO项目组的一位负责人合作过人造肌肉及人形机器人控制规划的项目。后面ASIMO整个项目组的经费大幅度削减转为非公开研究——原因之一是商业化道路受阻。
不过,从实际产品来说,特斯拉这次发布的Optimus原型机,如预期一样,没有太多惊艳或显著突破◆★■。肢体协调相对流畅,但从行动速度、肢体晃动和震颤幅度,距离之前ASIMO也仍存在比较大的差距。Demo全程是提前完成的规划,任务选择上也规避了带有精细接触力控制的操作。有实质意义的任务是浇花和抓放物件★★,但也都不需要和环境产生持续接触。
互联网技术革命改变了交易型行业,因为它将信息传输提高了10倍——先是线上交易,又转化为服务交易、娱乐交易。机器人正好反过来。它改变的服务是实物型、制造型,它最终会重塑行业——要知道,是机器人农业,不是农业机器人;是机器人纺织,不是纺织机器人。所以,行业里的公司不一定要和特斯拉一样造机器人★◆,把机器人用好◆■,市场规模甚至比造机器人大好多倍。
但那时还是蒸汽机年代,怎么可能用蒸汽机控制每根羽毛■★,让它推进升力和控制?到今天都不可能。最终解决方案是■★:机翼搞升力★◆■■,螺旋桨搞推进★★◆,控制系统你会发现所有飞机,不是一个翅膀,它总有一个大翅膀和小翅膀,小翅膀用来控制,这样飞机才可以飞。要去理解本质★■◆★★◆,不能仿生◆★★★★◆。人是碳基的,自然界很多是无机物,能量的方式跟人完全不一样。
邵天兰:创业公司能做好单个细分市场第一名■◆■◆■,已经非常不容易。但像特斯拉这种巨型企业◆◆★,有资源◆■★◆◆、有耐心■■◆◆★,也许目标会更接近★★“机器人帝国”。当然,人形机器人未必会成为真正的最终形态。
曹巍■◆★■★★:60年代末、70 年代初,日本早稻田大学就开始研究人形机器人★■★■★★。它不是新概念,但经过重要的milestone◆◆。
曹巍:我关注它是不是能发布一个如它demo中体型的机器人■◆★。体型非常讲究◆★■★◆■,涉及材料、重心设计、步态算法★★◆■■。人的脚的大小也很关键。波士顿动力的机器人脚都特别大。我比较期待,它能够在机器人外形上做出demo演示的范儿——不要上面挺细■★■◆◆◆,下面一双大脚。在这个工程基础上快速走起来★★■■■,不丢失,做基础搬箱子的运动◆◆★★■◆。已经很amazing了。
俞浩■■:大家没有正确理解(马斯克发布)机器人的意义。意义不在拟人性◆★◆。拟态不重要。重要的是有没有一个通用机器人■★★★■,能放到生产、生活方方面面★■。
字节跳动全球AI战略或有调整,AI或成美国攻击TikTok的新理由★★◆■★◆;阿里电商组织调整后续的披露丨Going Global
我认为马斯克展示的人型机器人◆◆■,和小米的铁大类似■■,作为原理样机展示了足够的诚意。当然对比波士顿动力等研发时间更久的人型机器人来说,在硬件和控制的差距是明显的◆■■★★★,暂时没有展示出明显超过行业当前水平的技术。
俞浩■◆★:它还是一种机器人形态,我们在研究这个形态,同时,我们也在寻找执行器上有没有重大突破。
曹巍■■★:这里还有一个悖论,当人形机器人出来,大家愿不愿意买回家?这里学术界会讨论“恐怖谷效应”★■★◆。我给你画一下(下图)◆■■◆◆★。
曹巍■◆★:一个是《I, Robot》,一个是《西部世界》★★★★■。《I, Robot》还在我们说的恐怖谷阶段★◆◆★★,还知道它是机器人★■■★,有点吓人★■■★★。《西部世界》就完全是人形。
如果出发点是要机器人成为人类的仆人,它是否像人,根本不是核心。核心在于它的手臂和灵巧的手■◆,是否具备人的上肢的作业操作能力。我以前在高校工作,是搞研究的,研究仿生机器人,后来变成创业者◆■◆◆■■,本质转变是思考的出发点★◆■。在高校,我关注的会是擎天柱机器人的技术指标,比如稳定性、行走能适应什么地面■■■★、走得多快、负重多少……但作为创业者,我更愿意讲PMF,产品、市场匹配。
曹巍◆★:风险是节奏把握■★。你只要能活下来◆■■■★◆,坚持活30年,一定有价值。问题是很多公司在波动中控制不好节奏,就挂了。我们还没看到机器人的负的外部性★◆◆■★。
比如叉车机器人◆◆★★★■,它是个叉车■■■◆◆,平板上能落很多东西——三个电视机■★◆、两个大箱子,还能插零七八碎的货物。不可能一个货舱里500个机器人◆★■■★★,两条腿在那跑,每个人只抱一个箱子,这不合逻辑◆★★◆■。
王世全◆■■★:它的特点是基于“力觉”自动实时调整■★。现在力控相互补的一条路线,也是大部分机器人走的路线,是◆◆“位置控制”。工业机器人发展50多年,主流是位置控制。逻辑是,先知道让机器人以什么固定路径走◆★◆★★,反算机械臂不同关节该怎么动,最终实现固定轨迹。但过程中各类误差和变化◆★■■,是机器人编程时没法预知的。这类机器人只能沿着既定轨迹工作,通过外部传感器非实时地做些有限调整◆■■■,开放环境下容易导致工作效率降低,或者任务失败。这是传统位置控制机器人的最大问题■★■■。
邵天兰◆◆:机器人是next big thing★★★■◆◆,这是毫无疑问的。我认为可以对标1980年的电脑◆◆■★◆。你想人类登月是1972年★◆■★,1980年美国的大公司已经在用电脑了,但是中小企业和个人还没有用起来■◆■◆。就很像这个状态★◆■★◆■。
要让这个机器人不仅仅轨迹做好,还要在动的过程中实时地适应◆◆★■■★。比如◆★◆■,擦桌子如果桌子摇晃,人类怎样适应?我们靠的是手的力的感觉和对接触力的实时调整◆■★◆■,保持压力恒定,无论桌子怎么晃,贴着它动。这就是力的自适应过程。我们是沿着仿人化道路走,让机器人的工作模式更像人的直觉反应。
腾讯科技■★■◆:说到马斯克◆◆■◆★,他又做车◆■★★◆◆,又做航天◆◆■■★,又做人形机器人,为什么选择这几个方向?这几个方向对人类未来代表什么★■◆?

俞浩:特斯拉的机器人进家庭是不是人形◆◆,我会打问号★■◆。我认为◆■,机器人技术进家庭更好——不是进来一个机器人★◆★,而是你的house就是机器人——智能音响是耳朵◆◆■,camera是眼睛,扫地机器人是腿。
曹巍:工业很多场景不一定非要双足的人形机器人,反而是和人生活息息相关的服务场景。比如家政——机器人看孩子◆◆◆★★、擦玻璃■★、叠衣服◆★、收拾屋子。很难想象一个大铁疙瘩◆◆◆◆◆,把这些事做了。
特斯拉做人形机器人,我认为是两方面意义:一方面在于使得零部件成本进一步下降,他们有电机,做电池■★◆◆■★,做一些核心零部件,可以推动零部件的产业化、批量化★■、把成本往下拉;另一方面是计算硬件,因为他们做无人车,有开发自己算力越来越强的硬件。这两块对行业推动是有贡献的★■■。
肌肉是拉伸运动,电机是回转运动◆◆■■★■。回转运动的优势是什么呢?速度可以很快。但它要做力■◆◆★,要进行一级■■■、两级、三级◆■、四级的传动才能把力减少下来。而且即使减下来,它依然不如肌肉的力■■★,这是限制的最根本原因◆■。比如说我们做机器狗,着力点是单脚趾的单点,模型都是单点模型。但人的脚很复杂,能◆★“脚趾板抠地”,可以多点平衡★★■◆★■。人的这些精细动作(机器人)不能做到,这是我担心的最底层问题■◆◆★■■。
俞浩◆★■◆:人类会全面重新分工★★,机器人进入各行各业◆★,不是机器人来简单的替代,而是和行业深度结合◆◆★◆、共振。
首先是做好步态控制。早稻田是走路很慢的机器人,节律、节拍和运动控制是平缓状态。直到波士顿动力,才让人形机器人运动节拍、速度跟人很像。就不说别的■★◆,只是说运动、步态★■◆◆◆,前后有40-50年研究周期。移动机器人分成用轮子、履带、双足和四足移动■★。双足是最难的。当说自主移动机器人,做两足慢速和做两足快速就有巨大的技术分水岭。
他们中有人认为人形机器人犹如登月计划,一个简洁明了★■◆■、鼓舞人心的远大愿景★◆★■,象征意义大于能实际落地的真实功能。但在这场有巨大想象力的营销驱动下,可以吸引人才、产生中间态产品。
当然,他们也表达了,我们应当对推动人类科技进步的大胆想法、短期技术突破面临的现实瓶颈,予以包容和耐心。
机器人创业极其凶险在于◆★★★◆,做的东西涉及链条很长,比如机械、电子★■◆◆■、控制、光学、可靠性◆■、软件、算法、工艺■■◆、方案、服务等等。你通常只有开一枪的机会★◆,这一枪可能要花你3年甚至5年。如果一击不中,那肯定跪了★■■◆◆■。
步态控制只是基础。它能在环境中用两足快速敏捷移动后■◆,就基本具备人形机器人稳定移动的能力。在这个基础上,机器人跟自动驾驶类似又不太一样的,是环境感知。感知是收集数据。中间是决策,就是它去评估和规划。最后做控制。最终实现的是slam★◆★■★,基于视觉的实时建图和导航定位。我们说感知-决策-控制-交互。人是强交互的物种。交互我不好说特斯拉能做到什么水平■★■◆。

1★★■◆★■、中国是受人口老龄化影响严重的社会,年轻人不愿意干体力活,制造业缺人厉害;

现在特斯拉通过产业优势和算力优势可以入局★■■,但从技术演进的节奏看■■■■★◆,实现真正面向家用、面向全方位价值体现的机器人,是很难的过程。他们核心团队也到过斯坦福我以前实验室的教授那,做过咨询和讨论■★◆◆。
腾讯科技★★◆★:在你的构想中★◆,未来10年、50年、100年人类社会以后会是什么样★★?
也有人认为,马斯克发布机器人■■,真正意义根本不在人形,自始至终大家都把聚焦点搞错了——拟态不重要。在他看来◆◆,马斯克之所以高调宣传人形,就像消费电子拿噱头吸引消费者一样,真实意图在于实现通用性。“某种意义上★■★◆◆,机器做成彻底的人形,是人类特别没有想象力的标志■◆◆★◆★。飞机如果做成鸟的形状有啥想象力?”
我和很多机器人从业者都认为,人形机器人要量产还是一件比较遥远的事,可能需要10年、20年甚至更久。但这是一个激动人心的引领性目标。就像人类登月一样——登月本身产生的直接价值可能没那么大◆■■★,但这个目标足够简单明了■◆、激动人心◆■,可以吸引众多人才参与。在实现引领性目标的过程中■◆■◆■,很可能产生技术成果■■◆◆,和中间态的产品★◆■◆◆。
还有一个是波士顿动力,它更像运动员★★,偏跑酷能力的探索。突破的是机器人另一个局限——硬件机能的上限。
某种意义上◆◆■★■,机器做成彻底的人形,是人类特别没有想象力的标志。飞机如果做成鸟的形状有啥想象力?都是一个鸡在前面扑◆★。飞机后来为什么五彩斑斓?是因为理解了本质。碳基生物有碳基生物的弱点★■■★◆,我们发现了无机世界的优点■◆■★★◆,所以飞机的速度比鸟飞得快多了。
王世全:一般来讲我过去,检测人员拿试纸,我张开嘴巴去动,这是很自然的过程。但设计机器人,就要考虑到什么时候让被试者张开嘴,张开嘴以后机器人理论上就开始找你的喉咙和扁桃体,什么时候机器人开始动★★■■◆■,动的过程中怎么样让人自然而然地不会避开,什么时候采集完它就结束◆★■★。人跟人的互动是一个下意识的◆★■■。但是机器人跟人互动的点,以及机器人不同判断衔接的点◆◆★■,是蛮微妙的。
我们的目标是把外骨骼机器人做成新产业,每个人都会用到。可能是早上穿的一件衣服。年轻人喜欢睡懒觉,可以在外骨骼上再睡一觉,它带着我按既定路线挤地铁、走向公司★◆■◆■、坐到办公位上◆■★★★,这时可以醒来。
曹巍:都是工业领域最有想象空间的超长赛道。没准马斯克也是《西部世界》粉丝,他的目标可能也是未来构建一个人和机器人分不出的世界。他还做了脑机接口,把他的intelligence移植到机器人身上实现智慧的永存◆★◆■★,殖民到火星◆■■★。他有一套对未来社会和科技发展的理解,比较极致。
从感知看,自动驾驶只需要知道这个大概是车,是五菱宏光还是奔驰■■★★◆◆、宝马并不重要;那个大概是人,是男人◆★■★★、女人也不重要■★。机器人不行,我说拿剪子给我,就得分辨哪个是剪子,而不能拿成钳子。你想,家用人形机器人得认识多少东西啊★◆,类别数量和精度要求都比自动驾驶高太多。
本文(含图片)为合作媒体授权创业邦转载★■,不代表创业邦立场,转载请联系原作者。如有任何疑问,请联系。
◆■■★★■“如果你能让今天的机器人去很好地绑鞋带,或者从洗衣机把衣服拿出来★◆、抖平、挂起来,你可以成为非常出名的顶级教授甚至院士。我绝对不是夸张。”一位CEO说◆■。

互联网百花齐放,因为它迭代快★★,试错成本相对低,创业公司可以快速调整。像我们公司从2016年底成立◆★★◆◆,一路没走过大的弯路◆★★,资源也相对充足。即使如此,我们做了3、4年,产品才逐渐OK。如果我当时出来产品不行,就没资源开第二枪了。
俞浩:马斯克认为特斯拉可以做通用机器人,是因为通用机器人有两个问题解决:一是执行器,一是控制。控制核心挑战和自动驾驶一样,是对真实世界的识别■★◆◆■★,从而适应环境多样性。马斯克觉得他在自动驾驶牛X,有芯片。挑战恰恰在于是否有执行器端的创新。
我举个例子,马斯克曾经有个采访非常夸张——有人问SpaceX火箭发动机的进展,他马上说★◆:为了在火星建造一个可自我维持的城市,至少要运几十万人上火星★◆◆★。然后,他就算,这至少需要发几千颗火箭★★◆◆■■,所以要把火箭做得很便宜,能大量生产。
俞浩★◆◆★◆★:机器人承载了人类很多美好想象★◆◆■。往往前期,人们会发挥一点拟态作用。实际这些人搞反了公海官方网710jcjc◆★◆◆。robot到中国★■■◆,可能翻译不太好,翻译成自动机器就好了。叫“人◆■■”★■◆■★,大家会有拟态的想象和新奇性,反而忽略本质——本质是,自动地进行环境感知、识别、规划和运动控制的机器■■◆★■■。
(上网搜索中……)嫦娥工程第一期总投资约14亿元人民币,这个资金其实并不太多,很多独角兽企业的融资额都超过这个数字。当年阿波罗计划有超过美国当时3%的GDP用于这件事。总之在航天领域■★★,经费是个明显因素。
人形机器人也可以用这样的特点。在产业发展早期■■★,使用它的一个特征——因为我们习惯和自己亲近的东西◆◆★★,所以利用人的拟态性。但我想马斯克做这件事■◆★■■,真正意义绝对是为了通用性,绝不是拟态,不是为了把它当消费电子卖■★。
但是★◆,当你做越大的机器人★◆★,需要的电机越多■◆◆◆,越多就越重,越重扭矩需求就越大。所以,如果你的能量密度不够大,很难支撑足够大的人形机器人,会陷入死循环。对这种驱动能力的能量密度的追求,也是一条技术突破主旋律。
“机器人”本身不是好翻译◆■◆★★。robot最早的语义是奴隶。一个捷克的作家卡雷尔·恰佩克,发明了robot这个词,在斯拉夫语里就是labor、劳力★★、奴隶★★,或者叫工具人。
邵天兰:这两天马斯克发布特斯拉人形机器人的原型机,作为机器人行业参与者,朋友圈很多朋友转发评论。很有意思的是,原型机的水平远远没有达到非专业人士预期,但专业人士都表示不出所料★◆◆★★。
第一个被人类骗钱的AI傻了,近5万美元不翼而飞!Scaling Law还能带我们到AGI吗◆★■■◆★?
另一块瓶颈来自AI★★★■。无人车还没完全解决长尾问题。家用机器人面对的长尾更多■◆★,它不仅只是开方向盘,整个肢体协调、解决各式各样琐碎的事——光擦个桌子就有成百上千万种可能的corner case◆★◆★★。不是单纯一个算力提升就可以★★。
腾讯科技★■:除了制造业场景,我看到你们也做核酸采样机器人。像这样一个我们每三天都要面对的高频场景,你们有发现什么我们不知道的小细节吗?
邵天兰:这个愿景激动人心,但离当前技术水平还很远,如果我有生之年能看到我会非常高兴■◆★。这么说吧,如果你能让今天的机器人去很好地绑鞋带■■,或者从洗衣机把衣服拿出来、抖平、挂起来★■★■◆■,你可以成为非常出名的顶级教授甚至院士◆■★。我绝对不是夸张——机器人行业当前真实的技术水平和行业外人士的认知有很大差距★★■◆。
腾讯科技■★■:机器人会成为像电脑、手机、电动车这样的大浪潮吗★■■■★★?如果会,对标发展的哪个阶段?
王世全:最最核心是因为,现在的人形机器人技术关注点集中在腿部◆★◆,对完成日常任务必不可少的手臂及相应的全身协调,技术上更多以位置控制为主◆■★■◆,跟环境之间基于力的精细操作及交互不是主旋律★★★◆,所以对周边结构化环境要求很高★■,会限制机器人高效率地、举一反三地、稳定地完成日常工作★■■★★。

腾讯科技■■■★★■:马斯克的描述是◆■,机器人进入千家万户,替代人们做饭◆■★◆◆★、修剪草坪■■★★■、照顾老人。
波士顿动力是不计成本地在做最快优化。后面它用液压的方式,因为液压能量密度更大。它腿部的骨骼是金属3D打印出来,把液压的流道嵌到里面,再提升运动能力、爆发力。再后面它有电控出来了★★★◆。整个过程都在推动能量密度的上限。不过,这也意味着它更多是运动机能的提升■■★★★,跟我们说的想把人形机器人用到家用★◆、日常◆■■,本质没有很大改善。(比较难落地)













